You must login before you can run this tool.
MEMSLab
Simulation suite for electromechanical actuators



Category
Published on
Abstract
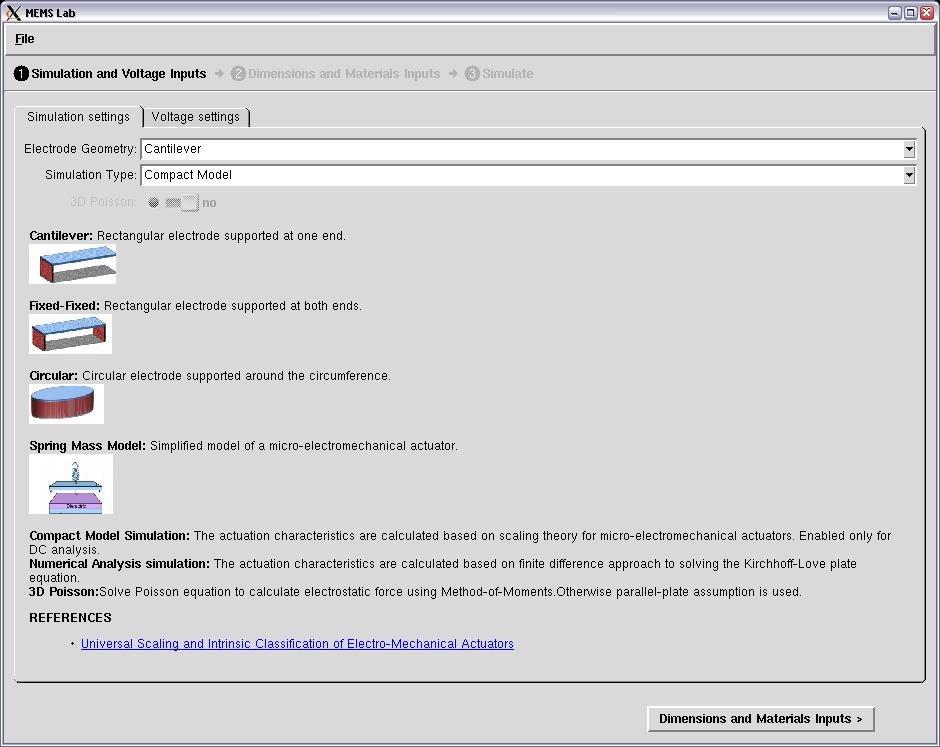
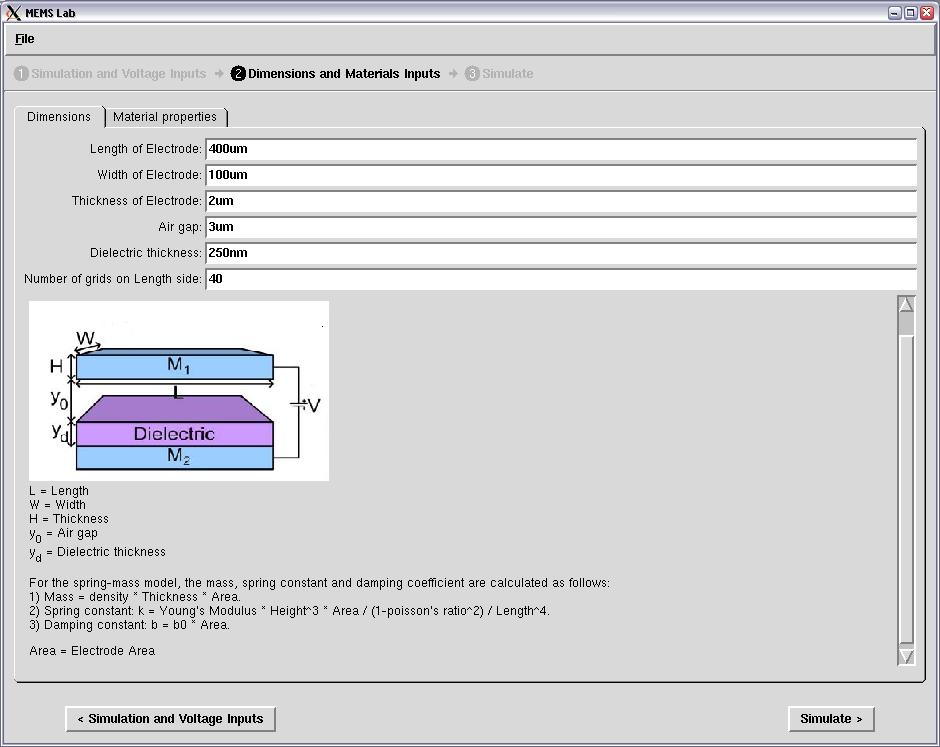
MEMS actuators have multiple design applications. Understanding their behavior as well as the ability to predict their actuation characteristics and voltage response is important when designing these actuators. In order to determine how these devices will behave, designers have to perform computationally expensive finite element simulations or design experiments that can be very time consuming. This tool is created to allow users to enter basic information about a MEMS actuator and obtain a reasonably accurate estimation of the actuation response of the actuator. A compact model based on a scaling theory developed in Ref. [1] provides an almost instantaneous estimation of the actuation voltages (pull-in voltage and pull-out voltage) and the hysteretic CV characteristics (for both below pull-in and post pull-in states). A more comprehensive numerical simulation option, which employs the Kirchoff-Love plate equation, is also available. Quasi-static and dynamic response for cantilever, fixed-fixed and circular beam shapes can be obtained using the numerical simulation. A method-of-moments based 3D Poisson solver can also be invoked if necessary. For users who want to understand the basics of MEMS actuator operation, quasi-static and dynamic simulations can be performed for a simple spring-mass model.
Sponsored by
Network for Computational Nanotechnology (NCN) Purdue Center for Prediction of Reliability, Integrity and Survivability of Microsystems (PRISM) MIT Center for Materials Structures and Devices (MSD) Summer Undergraduate Research Fellowship (SURF)
References
[1] S. Palit, A. Jain, and M. Ashraful Alam, "Universal scaling and intrinsic classification of electro-mechanical actuators," Journal of Applied Physics, vol. 113, 2013. [2] http://en.wikipedia.org/wiki/Kirchhoff-Love_plate_theory [3] A. Jain, S. Palit, and M. A. Alam, "A physics-based predictive modeling framework for dielectric charging and creep in RF MEMS capacitive switches and varactors," Journal of Microelectromechanical Systems, vol. 21, pp. 420-30, 2012. [4] A. Jain, P. R. Nair, and M. A. Alam, "Strategies for dynamic soft-landing in capacitive microelectromechanical switches," Applied Physics Letters, vol. 98, p. 234104 (3 ), 2011.
Publications
S. Palit, A. Jain, and M. Ashraful Alam, "Universal scaling and intrinsic classification of electro-mechanical actuators," Journal of Applied Physics, vol. 113, 2013. A. Jain, S. Palit, and M. A. Alam, "A physics-based predictive modeling framework for dielectric charging and creep in RF MEMS capacitive switches and varactors," Journal of Microelectromechanical Systems, vol. 21, pp. 420-30, 2012. A. Jain, P. R. Nair, and M. A. Alam, "Strategies for dynamic soft-landing in capacitive microelectromechanical switches," Applied Physics Letters, vol. 98, p. 234104 (3 ), 2011.
Cite this work
Researchers should cite this work as follows: